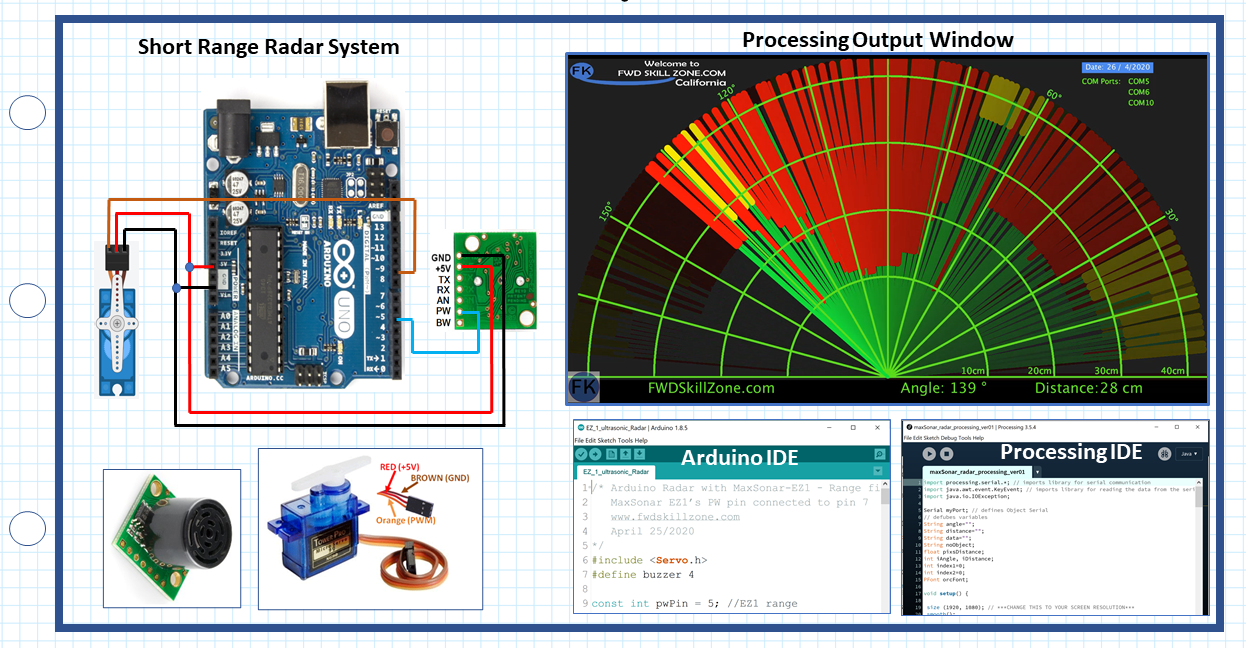
Short Range Radar System - MaxSonarIn this project, we will design and construct a Short Range- MaxSonar Radar System that will measure the distance from the front of the sensor to the nearby object. For this project, we need Ultrasonic range finder, Servo motor, Arduino UNO, and jumper wires. I have also used a motor shield, but it is optional. I have selected the MaxSonar EZ-1 range finder for the ultrasonic sensor because of its precision, and it comes with a variety of options to choose from. This sensor provides a very accurate reading of 0 to 255 inches (0 to 6.45m) in 1-inch increments with little or no dead zone! Software-wise, we need Arduino and Processing IDE. Both these IDE’s are open-source and can be downloaded from the internet for free.
EZ1 Maxsonar Ultrasonic Sensor
The MaxSonar EZ1 ultrasonic sensor is a single sensor device that operates in a free run mode. What this means is the sensor will continue to range until power is removed from the sensor. This is generally the easiest way to operate in a single sensor setup. The MaxSonar sensor can operate with a trigger signal, meaning, the sensor can be connected to a microcontroller, a computer, or anything else that is capable of initializing the sensor to start a ranging cycle.
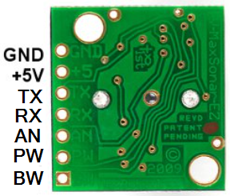
Pin Out Description
Pin 4-RX– This pin is internally pulled high. The LV-MaxSonar-EZ will continually measure range and output if RX data is left unconnected or held high. If held low the sensor will stop ranging. Bring high for 20uS or more to command a range reading.
Pin 5-TX- When the *BW is open or held low, the TX output delivers asynchronous serial with an RS232 format, except voltages are 0-Vcc. The output is an ASCII capital “R”, followed by three ASCII character digits representing the range in inches up to a maximum of 255, followed by a carriage return (ASCII 13). The baud rate is 9600, 8 bits, no parity, with one stop bit. Although the voltage of 0-Vcc is outside the RS232 standard, most RS232 devices have sufficient margin to read 0-Vcc serial data. If standard voltage level RS232 is desired, invert, and connect an RS232 converter such as a MAX232. When BW pin is held high the TX output sends a single pulse, suitable for low noise chaining (no serial data). Pin 6- Vcc (+5V) - Operates on 2.5V - 5.5V. Recommended current capability of 3mA for 5V, and 2mA for 3V. Please reference page 4 for minimum operating voltage verses temperature information. Sensor Minimum Distance and Range “0” Location
The LV-MaxSonar-EZ reports the range to distant targets starting from the front of the sensor as shown in the diagram below. In general, the LV-MaxSonar-EZ will report the range to the leading edge of the closest detectable object. Target detection has been characterized in the sensor beam patterns. 
The range is measured from the front of the MaxSonar.
Sensor Minimum Distance
The sensor minimum reported distance is 6-inches (15.2 cm). However, the LV-MaxSonar-EZ will range and report targets to the front sensor face. Large targets closer than 6-inches will typically range as 6-inches. Servo Motor SG90
The Servo Motor SG90 is a tiny and lightweight with high output power. The servo can sweep approximately 180 degrees (90 in each direction) and works just like the standard motors. You can use any servo code, hardware or library to control these servos. Good for beginners who want to make stuff move without building a motor controller with feedback & gear box, especially since it will fit in small places.

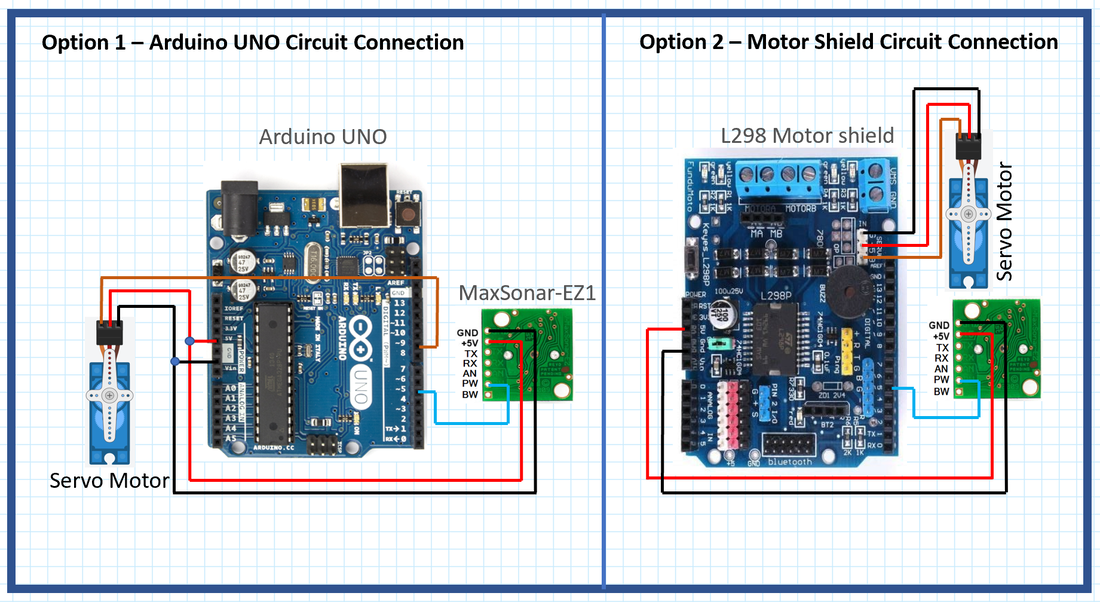
Circuit DiagramThe circuit can be constructed by using Arduino UNO without the a motor shield as the current requirement of the servo motor is very low. However, as a good practice, it is better to use motor drivers to control a motor/motors connected to Arduino.
Arduino has the following current limitation:
The following short video shows:
- The Arduino Radar DEMO, Arduino Code, Processing Code, and test results. |
|